Voyis VSLAM powered by EIVA NaviSuite 1.5 für Windows

Kostenloser Download Voyis VSLAM powered by EIVA NaviSuite 1.5 vollständige eigenständige Offline-Version für Windows PC,
Voyis VSLAM powered by EIVA NaviSuite Überblick
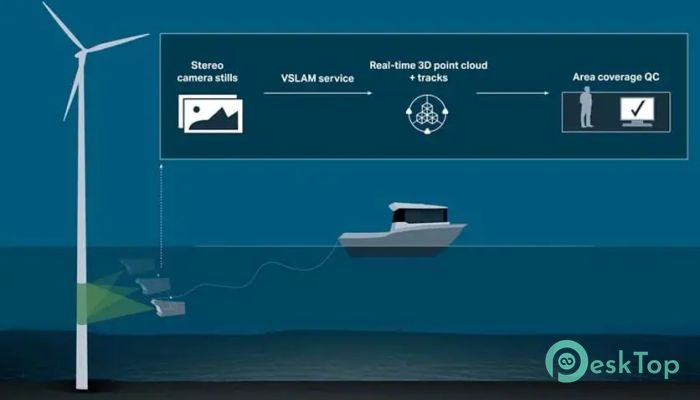
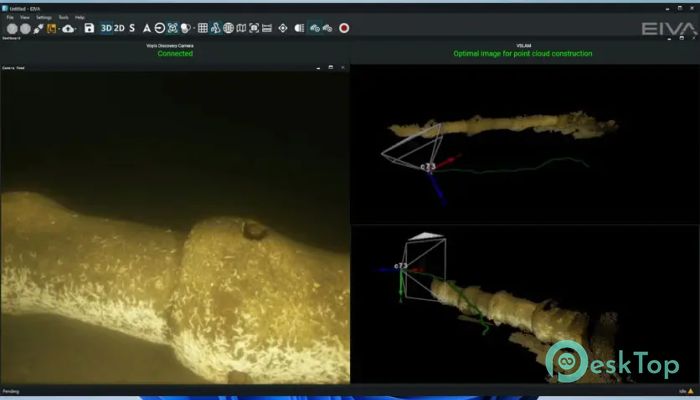
Integriert mit EIVA NaviSuite, ein ausgefeiltes Werkzeug nutzt fortschrittliche Computervisionstechnologie, um Echtzeit-Qualitätskontrollanzeigen zu liefern. Die Software erstellt präzise 3D-Punktwolken und Trajektorieplots, die dazu beitragen, eine überlegene Qualitätssicherung bei Vermessungen und verbesserte ROV-Visuelle Inspektionsergebnisse zu erzielen.Funktionen von Voyis VSLAM powered by EIVA NaviSuite
Echtzeit-QC-Anzeigen: Die Software bietet Echtzeit-QC-Anzeigen, die die Flächenabdeckung zeigen. Diese Funktion hilft sicherzustellen, dass die Umfrageergebnisse genau und umfassend sind, was für erfolgreiche Unterwasserinspektionen entscheidend ist. 3D-Punktwolken: Es generiert maßstabsgetreue 3D-Punktwolken mit Ihrer Discovery Stereo-Kamera. Diese Punktwolken bieten eine detaillierte und genaue Darstellung des untersuchten Bereichs und unterstützen präzise Analysen und Entscheidungsfindungen. Trajektorienplots: Die Software erstellt Trajektorienplots, die die Bewegung des ROVs verfolgen. Diese Funktion ist entscheidend, um den während der Umfrage zurückgelegten Weg zu verstehen und sicherzustellen, dass alle erforderlichen Bereiche abgedeckt sind. Hochwertige Standbilder: Es verknüpft hochwertige Standbilder in Echtzeit mit den 3D-Punktwolken. Diese Integration bietet einen umfassenden Blick auf den Inspektionsbereich und verbessert die Gesamtqualität der Umfrageergebnisse. Vorteile der Nutzung des Tools Verbesserte Umfrage-Qualitätssicherung: Die Echtzeit-QC-Anzeigen und genauen 3D-Punktwolken gewährleisten, dass die Umfrageergebnisse zuverlässig und von hoher Qualität sind. Diese verbesserte Qualitätssicherung ist entscheidend für fundierte Entscheidungen auf der Grundlage der Umfrageergebnisse. Verbesserte visuelle Inspektion von ROVs: Diese Funktion verbessert die visuellen Inspektionsfähigkeiten von ROVs, indem hochwertige Standbilder mit maßstabsgetreuen 3D-Punktwolken verknüpft werden. Diese Funktion ermöglicht detailliertere und genauere Inspektionen und verbessert die Ergebnisse. Steigerung der Effizienz: Die Fähigkeit der Software, Echtzeitanzeigen und Plots zu generieren, hilft dabei, Probleme oder Bereiche, die weitere Inspektionen erfordern, schnell zu identifizieren. Diese Effizienz kann Zeit und Ressourcen bei Unterwasserumfragen sparen. Wie es funktioniert Eingabe der Discovery Stereo-Kamera: Die Software verwendet die Eingabe Ihrer Discovery Stereo-Kamera, um die 3D-Punktwolken und Trajektorienplots zu generieren. Die Stereo-Kamera erfasst hochwertige Bilder, die die Software verarbeitet, um den untersuchten Bereich genau darzustellen. Echtzeitverarbeitung: Die Software verarbeitet die Eingabedaten in Echtzeit und bietet sofortige QC-Anzeigen und Updates. Diese Echtzeitverarbeitung ist entscheidend, um sicherzustellen, dass die Umfrage wie geplant verläuft und alle erforderlichen Bereiche abgedeckt sind. Integration mit EIVA NaviSuite: Es ist in EIVA NaviSuite integriert, einer umfassenden Softwarelösung für Offshore- und Marineoperationen. Diese Integration verbessert die Fähigkeiten beider Softwareprodukte und bietet ein robustes Werkzeugset für Unterwasserumfragen und -inspektionen.
Systemanforderungen und technische Details
Betriebssystem: Windows 11/10/8.1/8/7 Prozessor: Mindestens 1 GHz Prozessor (2,4 GHz empfohlen) RAM: 2GB (4GB oder mehr empfohlen) Freier Festplattenspeicher: 2GB oder mehr empfohlen

-
Programmgröße877.17 MB
-
Version1.5
-
Programmsprachemehrsprachig
-
Zuletzt aktualisiertVor 4 Monat
-
Downloads22